


Die Bestellung erfolgt durch Klick auf den Bestell-Button:
Dann öffnet sich Ihr e-mail-Programm mit den Bestell-Daten.
Rücktritt vom Kauf innerhalb von 14 Tagen
Die Bestellung erfolgt durch Klick auf den Bestell-Button:
Dann öffnet sich Ihr e-mail-Programm mit den Bestell-Daten.
Rücktritt vom Kauf innerhalb von 14 Tagen

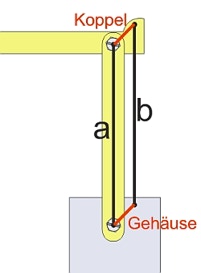
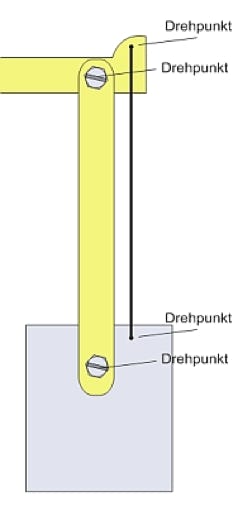
In Parkhäusern ist die Höhe eingeschränkt. Deshalb muss ein langer Schrankenbaum wie hier im Bild durch eine Vierer-Gelenk-Kette abgeknickt werden.
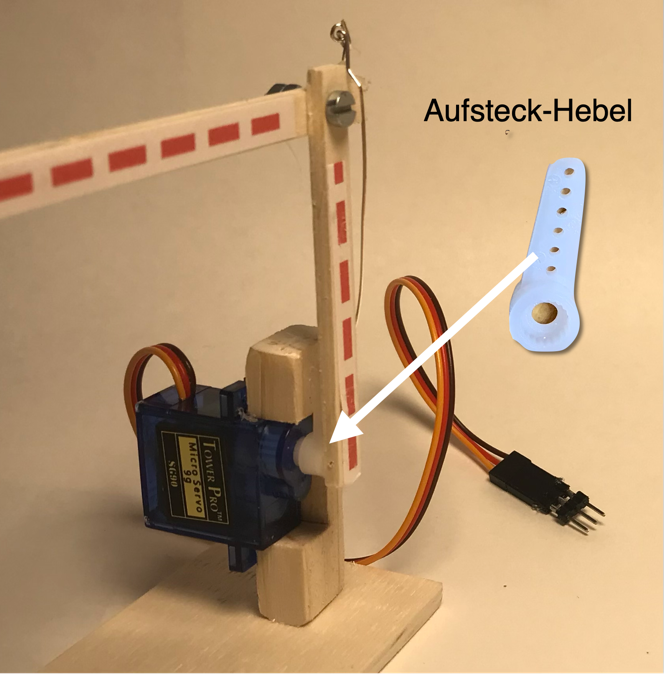
Das Servo ist hier einfach in eine Leiste eingeklemmt.
So kann es in die Schranke eingesetzt werden und genau so auch wieder herausgenommen werden.
ACHTUNG! Sie haben nur Zugang zu TINKERCAD,
wenn Sie angemeldet sind! So melden Sie sich an:
mit Handkurbel



Deine Parkschranke soll mit dem Servo angetrieben werden.
Beim Bau ist darauf zu achten, dass die gegenüberliegenden Seiten der Vierer-Gelenk-Kette gleich lang sind. Dann wird der vordere (linke) Teil der Schranke immer waagerecht geführt.
Die Schranke wird mit dem Aufsteck-Hebel einfach auf das Servo aufgesteckt.
Beim ersten Anschluss an den ARDUINO mußt Du herausfinden, welche Stellung richtig ist (0 - Stellung)
ACHTUNG!
Zur Schaltung geht es nur, wenn Sie bei TINKERCAD angemeldet sind!
Hier melden Sie sich an:


Teil 3 Ultraschall
Code
Bedeutung des Codes
Wenn Du die Schaltung wie oben ausgeführt hast,
- verbinde den Arduino mit dem Computer
- starte das Arduino-Programmfenster
- lösche den Text im Fenster
- kopiere den CODE (rechts) und füge ihn in das leere Programmfenster ein
- klicke auf Hochladen
#include <Servo.h>
Servo servoblau;
void setup()
{servoblau.attach(8);
}
void loop()
{servoblau.write(10);
delay(3000);
servoblau.write(110);
delay(3000);
servoblau.write(10);
delay(5000);
}
Die Servobibliothek wird aufgerufen. Sie wird benötigt, damit die Ansteuerung des Servos vereinfacht wird.
Erstellt für das Programm ein Servo mit dem Namen „servoblau“
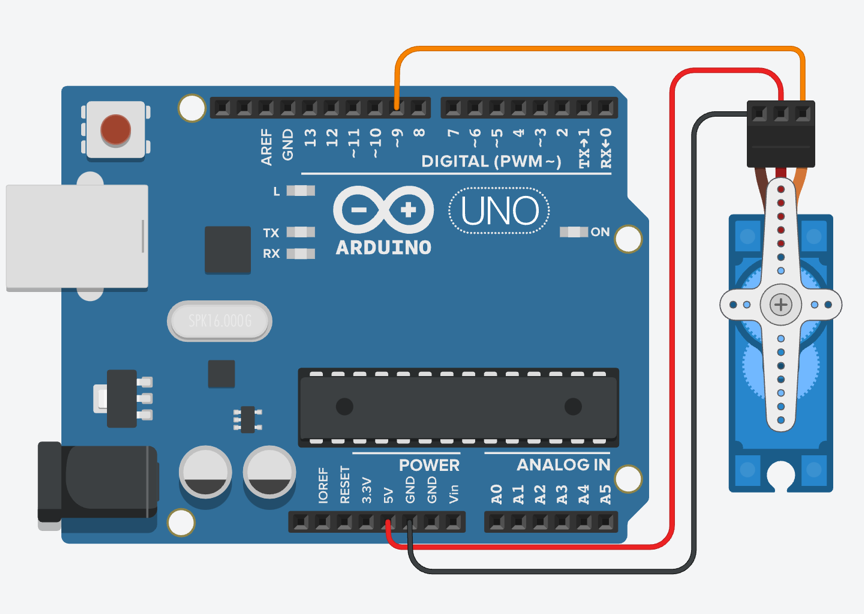
Das Setup enthält die Information, dass das Servo an der Steuerleitung (gelb) mit Pin 8 verbunden wird.
Im „loop“ wird über den write-Befehl „servoblau.write(Grad)“ das Servo angesteuert. Zwischen den einzelnen Positionen gibt es eine Pause, damit das Servo genug Zeit hat, die gewünschten Positionen zu erreichen.
Position 1 ansteuern mit dem Winkel 10°
Das Programm stoppt für 3 Sekunden
Position 2 ansteuern mit dem Winkel 110°
Das Programm stoppt für 3 Sekunden
Position 3 ansteuern mit dem Winkel 10°
Das Programm stoppt für 5 Sekunden
}
Die Schranke wird mit dem Aufsteck-Hebel einfach auf das Servo aufgesteckt.
Beim ersten Anschluss an den ARDUINO mußt Du herausfinden, welche Stellung richtig ist (0 - Stellung)
Probiere solange, bis Deine Schranke die beiden Stellungen „geöffnet“ und „geschlossen“ korrekt anzeigt.
1) Stelle die Öffnungszeit auf 30 Sekunden ein.

Wenn Du die Schaltung wie oben ausgeführt hast,
- verbinde den Arduino mit dem Computer
- starte das Arduino-Programmfenster
- lösche den Text im Fenster
- kopiere den CODE (rechts) und füge ihn in das leere Programmfenster ein
- klicke auf Hochladen
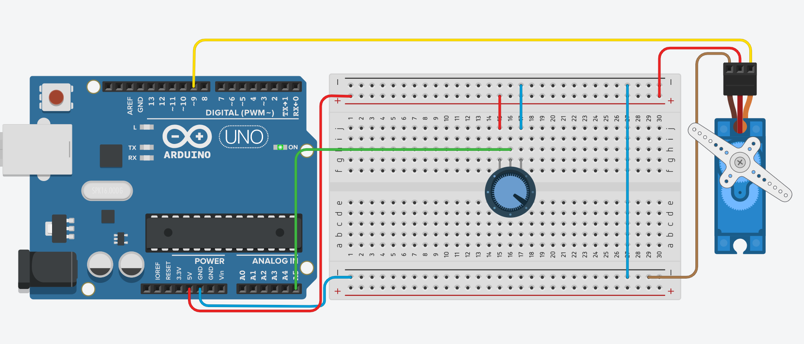
Nun kannst Du das Servo mit dem Potentiometer steuern.
#include <Servo.h> // Servo Library einbinden
Servo myservo; // Neues Servo Objekt erstellen
int val; // Wert des Potentiometers hier speichern
void setup() // setup() wird einmal zu Programmbeginn ausgeführt
{
myservo.attach(9); // Servo an Pin 9 koppeln
Serial.begin(9600); // Serielle Kommunikation starten
}
void loop() // loop() wird endlos wiederholt
{
val = analogRead(5); // Stellung des Potentiometers
an Anlog-Eingang 5 auslesen
val = map(val, 0, 1023, 0, 180); // 10-bit Wert des Analogeingangs
(0-1023) in Winkel 0-180 umrechnen
Serial.println(val); // Errechneten Winkel zur Kontrolle an
den PC übertragen (Seriellen Monitor starten!)
myservo.write(val); // Einstellwinkel in Grad an das
Servo-Objekt schicken
delay(50); // Kurze Pause, damit der Servo
die neue Position anfahren kann
}
Diese Website verwendet Cookies.
Bei Zustimmung klicken Sie auf
OK
Bitte lesen Sie unsere Datenschutzerklärung für Details.
Verweigern
Setzt ein technisches Cookie, das aufzeichnet, dass Sie die Zustimmung verweigern. Es wird nicht nochmals nachgefragt werden.
Entfernen
Entfernt das Zustimmungscookie aus Ihrem Browser.




